

Evaluate your road survey videos with precision and flexibility
It is as simple as mounting a down-facing camera to the rear of a hatchback and taking a drive. Just remember to record while driving.

Revolutionising cycleway inspection with cost-effective trike-mounted scanner
Meet the world's first high precision inspection platform for active mobility infrastructure

RoadGauge AI: Automated analysis of road inspection videos
Just upload your inspection video. That's all it takes to unlock in-depth insights.

Stereo-based 3D reconstruction of potholes by a hybrid, dense matching scheme
A fast stereo matching procedure is proposed. A preliminary keypoint matching estimates the global disparity between the stereo pair. The estimated disparity is used toward further keypoint and block matching procedure, by concentrating on smaller image regions. Images obtained from a moving vehicle are preprocessed to reduce the effects of image blur. Furthermore, algorithms to determine key critical metrological parameters, such as the area, depth, and volume, of a pothole are also developed.
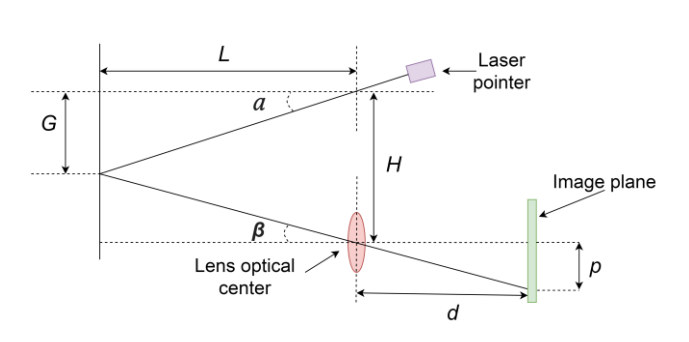
Pothole 3D reconstruction with a novel imaging system and structure from motion techniques
The technique utilizes a Structure from Motion based 3D reconstruction algorithm, along with laser triangulation, to generate 3D point clouds of potholes. Alongside, a novel low-cost system, consisting of a single camera and a laser pointer, is also proposed.